
Page 25 - Armaturobot
P. 25
L293D L293D
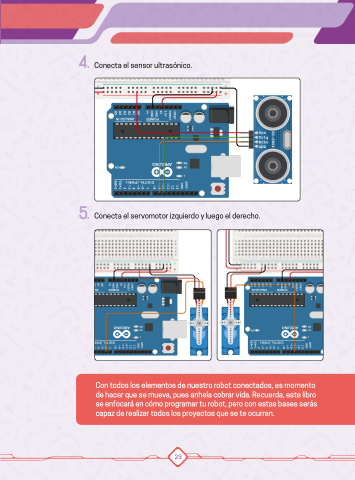
4. Conecta el sensor ultrasónico.
IOREF
RESET
3.3V
IOREF
5V
RESET
GND
3.3V
GND
5V
Vn
GND
GND
A0
Vn
A1
A2
A0
A3
A1
A4
A2
A5
A3
POWER ANALOG IN
A4
POWER ANALOG IN
A5
IOREF
RESET
3.3V
5V
GND
GND
Vn
A0
A1
A2
A3
A4
POWER ANALOG IN
A5
IOREF
RESET
3.3V
5V
GND
GND
Vn
A0
A1
A2
A3
A4
POWER ANALOG IN
A5
L
L
TX ON
TX ON
RX ARDUINO
RX ARDUINO
HC-SR04
Tr1g
Vcc
AREF
GND
13
AREF
12
GND
-11
13
-10
12
-9
-11
-8
DIGITAL (PWM-)
-10
-9
7
-8
-6
DIGITAL (PWM-)
-5
7
4
-6
-3
-5
2
4
TX 1
-3
RX 0
2
Echo
GND
TX 1
RX 0
TX ON
RX ARDUINO
L
AREF
GND
13
12
-11
-10
-9
-8
DIGITAL (PWM-)
7
-6
-5
4
-3
2
TX 1
RX 0
TX
RX
L
AREF
GND
13
TX ON
RX ARDUINO
L
AREF
GND
13
12
-11
-10
-9
-8
DIGITAL (PWM-)
7
-6
-5
4
-3
2
TX 1
RX 0
Conecta el servomotor izquierdo y luego el derecho.
5. IOREF
IOREF
RESET
RESET
3.3V
3.3V
5V
5V
GND
GND
GND
GND
Vn
Vn
A0
A0
A1
A1
A2
A2
A3
A3
A4
A4
A5
A5
POWER ANALOG IN
POWER ANALOG IN
IOREF
RESET
3.3V
5V
GND
GND
Vn
A0
A1
A2
A3
A4
POWER ANALOG IN
A5
TX ON
TX ON
RX ARDUINO
RX ARDUINO
TX ON
RX ARDUINO
TX
RX
L
L
L
L
AREF
AREF
GND
GND
13
13
12
12
-11
-11
-10
-10
-9
-9
-8
DIGITAL (PWM-)
DIGITAL (PWM-)
-8
7
7
-6
-6
-5
-5
4
4
-3
-3
2
2
TX 1
TX 1
RX 0
RX 0
AREF
GND
13
12
-11
-10
-9
-8
DIGITAL (PWM-)
7
-6
-5
4
-3
2
TX 1
RX 0
AREF
Con todos los elementos de nuestro robot conectados, es momento
de hacer que se mueva, pues anhela cobrar vida. Recuerda, este libro
se enfocará en cómo programar tu robot, pero con estas bases serás
capaz de realizar todos los proyectos que se te ocurran.
23