
Page 22 - Armaturobot
P. 22
5 cm de diámetro
Llantas
Pega con silicón aquí
5 cm de diámetro
Soportes protoboard
4 cm de diámetro
Parte móvil del motor
Orificio para portapilas
IOREF
RESET
3.3V
5V
GND
GND
Vn
A0
A1
A2
A3
A4
A5
POWER ANALOG IN
RX ARDUINO
TX ON
AREF
L
GND
13
12
-11
-10
-9
DIGITAL (PWM-)
-8
7
-6
-5
4
-3
2
TX 1
RX 0
4 cm de diámetro
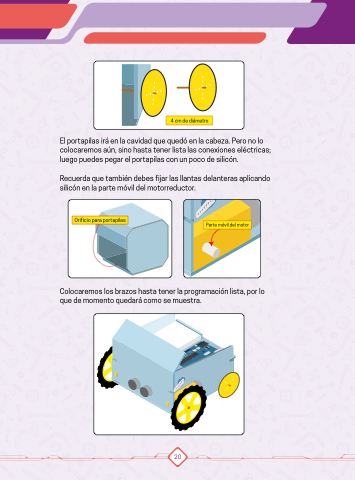
El portapilas irá en la cavidad que quedó en la cabeza. Pero no lo
colocaremos aún, sino hasta tener lista las conexiones eléctricas;
luego puedes pegar el portapilas con un poco de silicón.
Recuerda que también debes fijar las llantas delanteras aplicando
Llantas
silicón en la parte móvil del motorreductor.
IOREF
RESET
3.3V
5V
GND
GND
Vn
A0
A1
A2
A3
A4
A5
POWER ANALOG IN
4 cm de diámetro
Orificio para portapilas
RX ARDUINO
TX ON
AREF
L
GND
13
12
-11
-10
-9
DIGITAL (PWM-)
-8
7
-6
-5
4
-3
2
TX 1
RX 0
Colocaremos los brazos hasta tener la programación lista, por lo
que de momento quedará como se muestra.
IOREF
RESET
3.3V
5V
GND
GND
Vn
A0
A1
A2
A3
A4
A5
POWER ANALOG IN
IOREF
RESET
3.3V
5V
GND
GND
Vn
A0
A1
A2
A3
A4
A5
POWER ANALOG IN
RX ARDUINO
TX ON
DIGITAL (PWM-)
7
-6
-5
4
-3
2
TX 1
RX 0
AREF
L
GND
13
12
-11
-10
-9
-8
rtapilas
20
RX ARDUINO
TX ON
DIGITAL (PWM-)
7
-6
-5
4
-3
2
TX 1
RX 0
AREF
L
GND
13
12
-11
-10
-9
-8
A
A2
A3
A4
A5
OG IN
Parte móvil del m