
Page 21 - Armaturobot
P. 21
cables de los servomotores
servomotor izquierdo
14. Pega con silicón aquí
Pega con silicón aquí
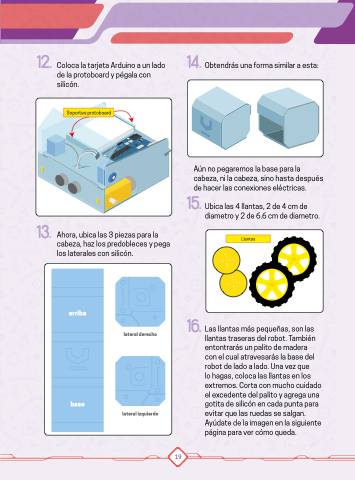
Obtendrás una forma similar a esta:
Pega con silicón aquí
Pega con silicón aquí
12. cables de los servomotores
Coloca la tarjeta Arduino a un lado
de la protoboard y pégala con
silicón.
Soportes protoboard
IOREF
RESET
3.3V
5V
GND
GND
Vn
A0
A1
A2
A3
A4
A5
POWER ANALOG IN
RX ARDUINO
TX ON
DIGITAL (PWM-)
7
-6
-5
4
-3
2
TX 1
RX 0
AREF
L
GND
13
12
-11
-10
-9
-8
Soportes protoboard
Pega con silicón aquí
IOREF
RESET
3.3V
5V
GND
GND
RX ARDUINO
Vn
A0
A1
A2
A3
A4
A5
POWER ANALOG IN
TX ON
AREF
L
GND
13
12
-11
-10
-9
-8
Aún no pegaremos la base para la
DIGITAL (PWM-)
7
-6
-5
4
-3
2
TX 1
RX 0
cabeza, ni la cabeza, sino hasta después
de hacer las conexiones eléctricas.
15. Ubica las 4 llantas, 2 de 4 cm de
4 cm de diámetro
diametro y 2 de 6.6 cm de diametro.
5 cm
Llantas
13. Ahora, ubica las 3 piezas para la
cabeza, haz los predobleces y pega
los laterales con silicón.
5 cm de diámetro
16. 4 cm de diámetro
arriba
lateral derecho
Orificio para portapilas
lateral izquierdo
base
IOREF
RESET
3.3V
5V
GND
GND
Vn
A0
A1
A2
A3
A4
A5
POWER ANALOG IN
RX ARDUINO
TX ON
DIGITAL (PWM-)
7
-6
-5
4
-3
2
TX 1
RX 0
AREF
L
GND
13
12
-11
-10
-9
-8
Orificio para portapilas
Las llantas más pequeñas, son las
llantas traseras del robot. También
entontrarás un palito de madera
con el cual atravesarás la base del
robot de lado a lado. Una vez que
lo hagas, coloca las llantas en los
extremos. Corta con mucho cuidado
el excedente del palito y agrega una
IOREF
RESET
3.3V
5V
GND
gotita de silicón en cada punta para
GND
RX ARDUINO
AREF
L
GND
13
12
-11
Vn
A0
A1
A2
A3
A4
A5
POWER ANALOG IN
evitar que las ruedas se salgan.
TX ON
-10
-9
DIGITAL (PWM-)
-8
7
-6
-5
4
-3
2
TX 1
RX 0
Parte móvil del motor
Ayúdate de la imagen en la siguiente
página para ver cómo queda.
19