
Page 19 - Armaturobot
P. 19
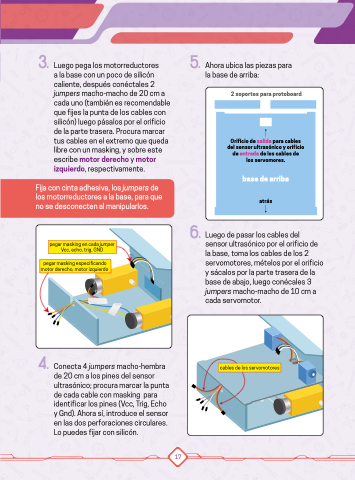
3. Luego pega los motorreductores
a la base con un poco de silicón
caliente, después conéctales 2
jumpers macho-macho de 20 cm a
cada uno (también es recomendable
que fijes la punta de los cables con
silicón) luego pásalos por el orificio
de la parte trasera. Procura marcar
tus cables en el extremo que queda
libre con un masking, y sobre este
escribe motor derecho y motor
izquierdo, respectivamente.
Fija con cinta adhesiva, los jumpers de
los motorreductores a la base, para que
no se desconecten al manipularlos.
5. 6. pegar masking en cada jumper
Vcc, echo, trig, GND
pegar masking especificando
motor derecho, motor izquierdo
4. Conecta 4 jumpers macho-hembra
de 20 cm a los pines del sensor
Pega con silicón aquí
ultrasónico; procura marcar la punta
de cada cable con masking para
identificar los pines (Vcc, Trig, Echo
Pega con silicón aquí
y Gnd). Ahora sí, introduce el sensor
en las dos perforaciones circulares.
Lo puedes fijar con silicón.
17
Ahora ubica las piezas para
la base de arriba:
2 soportes para protoboard
Orificio de salida para cables
del sensor ultrasónico y orificio
de entrada de los cables de
los servomores.
base de arriba
atrás
Base para la cabeza
Luego de pasar los cables del
sensor ultrasónico por el orificio de
la base, toma los cables de los 2
servomotores, mételos por el orificio
y sácalos por la parte trasera de la
base de abajo, luego conécales 3
jumpers macho-macho de 10 cm a
cada servomotor.
cables de los servomotores
servomotor izquierdo
