
Page 20 - Armaturobot
P. 20
servomotor izquierdo
pegar masking en cada jumper
Vcc, echo, trig, GND
pegar masking especificando
motor derecho, motor izquierdo
Pega con silicón aquí
Pega con silicón aquí
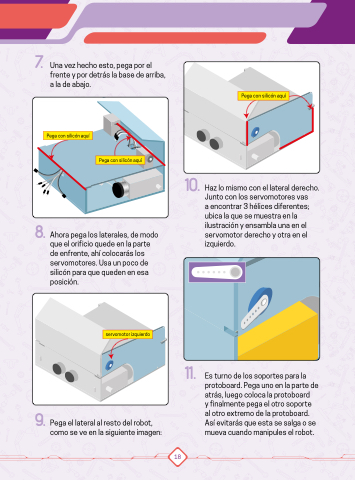
Una vez hecho esto, pega por el
Soportes protoboard
frente y por detrás la base de arriba,
a la de abajo.
L
IOREF
RESET
3.3V
5V
GND
GND
Vn
A0
A1
A2
A3
A4
A5
POWER ANALOG IN
RX ARDUINO
TX ON
AREF
GND
13
12
-11
-10
-9
DIGITAL (PWM-)
-8
7
-6
-5
4
-3
2
TX 1
RX 0
Soportes protoboard
Pega con silicón aquí
Pega con silicón aquí
servomotor izquierdo
7. Haz lo mismo con el lateral derecho.
Junto con los servomotores vas
a encontrar 3 hélices diferentes;
ubica la que se muestra en la
ilustración y ensambla una en el
servomotor derecho y otra en el
izquierdo.
Pega con silicón aquí
Pega con silicón aquí
IOREF
RESET
3.3V
5V
GND
GND
Vn
A0
A1
A2
A3
A4
A5
POWER ANALOG IN
10. RX ARDUINO
TX ON
AREF
L
GND
13
12
-11
-10
-9
DIGITAL (PWM-)
-8
7
-6
-5
4
-3
2
TX 1
RX 0
5 cm de diámetro
8. Ahora pega los laterales, de modo
Soportes protoboard
que el orificio quede en la parte
de enfrente, ahí colocarás los
servomotores. Usa un poco de
IOREF
RESET
3.3V
5V
silicón para que queden en esa
GND
GND
RX ARDUINO
Vn
A0
A1
A2
A3
A4
A5
POWER ANALOG IN
TX ON
AREF
L
GND
13
12
-11
-10
-9
DIGITAL (PWM-)
-8
7
-6
-5
4
-3
2
TX 1
RX 0
posición.
5 cm de diámetro
servomotor izquierdo
11. IOREF
RESET
3.3V
5V
GND
GND
Vn
5 cm de diámetro
A0
A1
A2
A3
A4
A5
POWER ANALOG IN
RX ARDUINO
TX ON
AREF
L
GND
13
12
-11
-10
-9
DIGITAL (PWM-)
-8
7
-6
-5
4
-3
2
TX 1
RX 0
Pega el lateral al resto del robot,
como se ve en la siguiente imagen:
IOREF
RESET
3.3V
5V
GND
GND
RX ARDUINO
Vn
A0
A1
A2
A3
A4
A5
POWER ANALOG IN
TX ON
AREF
L
GND
13
12
-11
-10
-9
DIGITAL (PWM-)
-8
7
-6
-5
4
-3
2
TX 1
RX 0
Pega con silicón aquí
Pega con silicón aquí
Es turno de los soportes para la
Parte móvil del motor
protoboard. Pega uno en la parte de
atrás, luego coloca la protoboard
y finalmente pega el otro soporte
al otro extremo de la protoboard.
Así evitarás que esta se salga o se
Parte móvil del motor
mueva cuando manipules el robot.
18
9. REF
D