
Page 35 - Armaturobot
P. 35
06
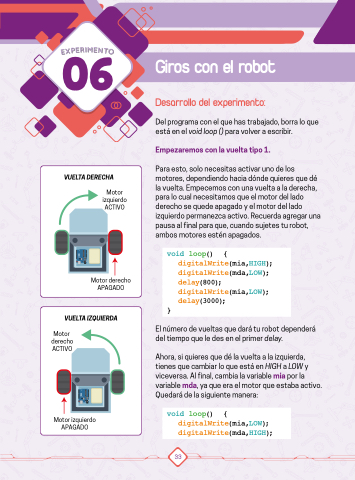
VUELTA DERECHA
VUELTA DERECHA
Motor
Motor
izquierdo
izquierdo
ACTIVO
ACTIVO
Motor derecho
Motor derecho
APAGADO
APAGADO
VUELTA IZQUIERDA VUELTA IZQUIERDA Motor
Motor
derecho
derecho
ACTIVO
ACTIVO
Motor izquierdo
Motor izquierdo
APAGADO
APAGADO
Giros con el robot
Desarrollo del experimento:
Del programa con el que has trabajado, borra lo que
está en el void loop () para volver a escribir.
Empezaremos con la vuelta tipo 1.
Para esto, solo necesitas activar uno de los
motores, dependiendo hacia dónde quieres que dé
la vuelta. Empecemos con una vuelta a la derecha,
para lo cual necesitamos que el motor del lado
derecho se quede apagado y el motor del lado
izquierdo permanezca activo. Recuerda agregar una
pausa al final para que, cuando sujetes tu robot,
ambos motores estén apagados.
void loop() {
digitalWrite(mia,HIGH);
digitalWrite(mda,LOW);
delay(800);
digitalWrite(mia,LOW);
delay(3000);
}
SOBRE SU PROPIO EJE
SOBRE SU PROPIO EJE
El número de vueltas que dará tu robot dependerá
del tiempo que le des en el primer delay.
Ahora, si quieres que dé la vuelta a la izquierda,
tienes que cambiar lo que está en HIGH a LOW y
viceversa. Al final, cambia la variable mia por la
variable mda, ya que era el motor que estaba activo.
Quedará de void loop() {
digitalWrite(mia,LOW);
digitalWrite(mda,HIGH);
la siguiente manera:
33
