
Page 70 - Electronica
P. 70
PUENTE H
Ahora que ya sabes cómo controlar la velocidad de un motor, debes
aprender cómo cambiar el giro del mismo. Como mencionamos antes,
los motores no cuentan con una polaridad como tal, sino que la
dirección del giro dependerá de la forma en que lo conectemos. Por
tanto, para variar el sentido del giro, necesitamos cambiar la forma en
que lo hacemos.
En un proyecto de robótica, lograr el cambio de giro de un motor es
sumamente importante: no solo necesitamos giros hacia un lado,
sino que también debemos poder avanzar y retroceder con un motor.
Sin embargo, cambiar el sentido del giro modificando la conexión del
motor resulta demasiado complicado. Para esto, se crea un arreglo
electrónico que nos ayudará a realizar esta acción sin tener que cambiar
el acomodo del motor. Como indica el título, el nombre del arreglo es
Puente H, dado que su esquema de conexión se parece a esa letra.
S1
S3
Vin
M
S2
S4
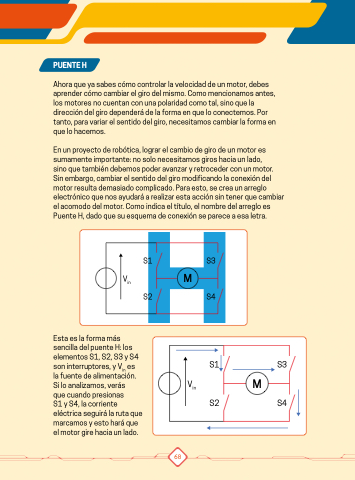
Esta es la forma más
sencilla del puente H: los
elementos S1, S2, S3 y S4
son interruptores, y Vin es
la fuente de alimentación.
Si lo analizamos, verás
que cuando presionas
S1 y S4, la corriente
eléctrica seguirá la ruta que
marcamos y esto hará que
el motor gire hacia un lado.
S1
S3
Vin
M
S2
S4
68
