
Page 15 - Armaturobot
P. 15
13
alguna modificación.
identificarlas rápidamente si queremos hacer
saber qué estamos conectando y poder
recomendable declarar estas variables para
número de pin al cual están conectados. Es
llamaremos Trigger y Echo, asignándoles el
de duración y distancia, así como otras que
la explicación, declararemos las variables
2. Es momento de programar, y al igual que en
IOREF
RESET
3.3V
5V
GND
GND
Vn
A0
A1
A2
A3
A4
POWER ANALOG IN
A5
hembra
• Jumpers macho-
HC-SR04
• Sensor ultrasónico
• Cable de descarga
TX ON
RX ARDUINO
L
AREF
GND
13
12
-11
-10
-9
-8
DIGITAL (PWM-)
7
-6
-5
4
-3
2
TX 1
RX 0
Vcc
Tr1g
Echo
GND
HC-SR04
• Tarjeta Arduino
Materiales:
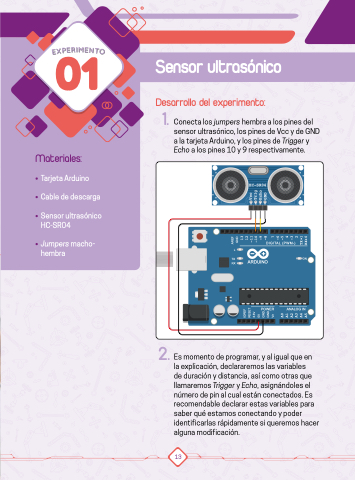
Echo a los pines 10 y 9 respectivamente.
a la tarjeta Arduino, y los pines de Trigger y
sensor ultrasónico, los pines de Vcc y de GND
1. Conecta los jumpers hembra a los pines del
Desarrollo del experimento:
01
Sensor ultrasónico
